SG.BP.2V.C3 Softgripping Controlbox







Soft-Gripping Details:
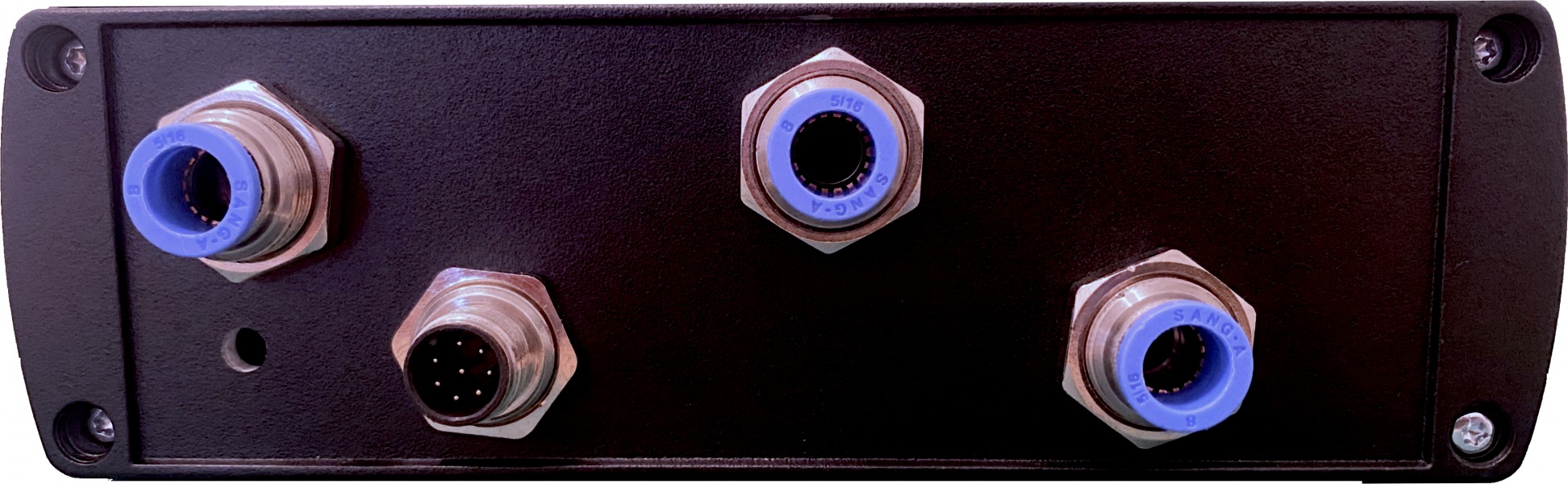
Außendurchmesser der Schläuche:8mm Druckbereiche: Drucklufteingang: 4 - 7 bar
Saugnapfausgang: -0.75 - 0 bar
Fingerausgang: -0.75 - 2.5 bar
Diese Controlbox benötigt einen externen Kompressor und ist für
Hochgeschwindigkeitsroboter geeignet, bei denen das Timing und eine hohe
Zyklenzahl von größter Bedeutung ist. Delta- und Scara-Roboter sind am besten
mit dieser Controlbox zu verwenden, aber auch fest eingebaute Roboter im
Dauerbetrieb, die einen Zugang zu einem Kompressor haben. Durch den zusätzlichen
Anschluss können auch Saugnäpfe verwendet werden. Die Greifer sind sehr robust und
können ohne Probleme mit einer Geschwindigkeit von über 120 Zyklen pro Minute betrieben
werden. Grundsätzlich ermöglicht der Einsatz dieser Box den Betrieb der folgenden
SoftGripping Produktlinien: Educational, SoftActuator und SoftGripper, ist aber auch
für andere Produktlinien einsetzbar. Auf der Vorderseite kann der aktuelle Druck in der
Druckanzeige abgelesen und über einen Drehknopf eingestellt werden. Auf der Rückseite
des Geräts befinden sich der Druckeingang und zwei Ausgänge. Die Ausgänge steuern die
Position der Finger. Sie können zwischen 3 Positionen umschalten: Greifen, Öffnen und
Entspannen.